8 - KAS IDE - Adjust EtherCAT Address in KAS project if needed
EtherCAT![]() ***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs node addresses are 1001, 1002, 1003, 1004, etc. If the added non-standard devices are placed at the end of the EtherCAT string then the addresses of the standard devices will not have to be altered, otherwise the user will need to go to the address screen to set up the proper address:
***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs node addresses are 1001, 1002, 1003, 1004, etc. If the added non-standard devices are placed at the end of the EtherCAT string then the addresses of the standard devices will not have to be altered, otherwise the user will need to go to the address screen to set up the proper address:
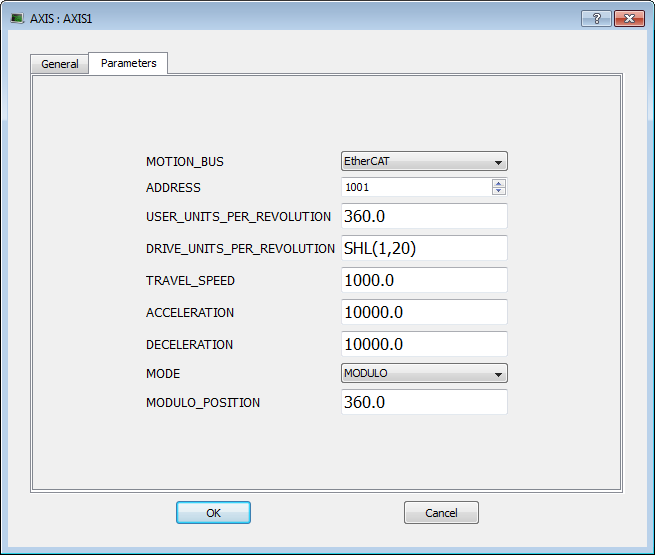
Figure 7-288: EtherCAT address setting for AKD drives
Compile the project before downloading to the target controller.






